Kelly Zhu
About Me
I am an incoming PhD student at CMU Robotics Institute. Previously, I completed my MSc in Computer Science with David Lindell and Kyros Kutulakos at the University of Toronto. Before that, I received my BASc in Engineering Science at the University of Toronto, where I was advised by Florian Shkurti.
My PhD is gratefully supported by the NSERC Canada Graduate Research Scholarship – Doctoral, and my MSc research was previously funded by the Vector Scholarship in AI, Queen Elizabeth II Graduate Scholarship in Science & Technology, and Ontario Graduate Scholarship.
Research
I am broadly interested in computer vision, machine learning, and robotics.
News
- [Apr 2026] I received the NSERC CGRS D for my PhD!
- [Jun 2025] I received the Ontario Graduate Scholarship!
- [Aug 2024] Awarded the Queen Elizabeth II Graduate Scholarship in Science & Technology!
- [May 2024] I was selected as a recipient the Vector Scholarship in AI.
- [Jul 2023] Our paper on multi-view 3D vehicle reconstruction has been accepted to ICCV 2023!
Publications
-
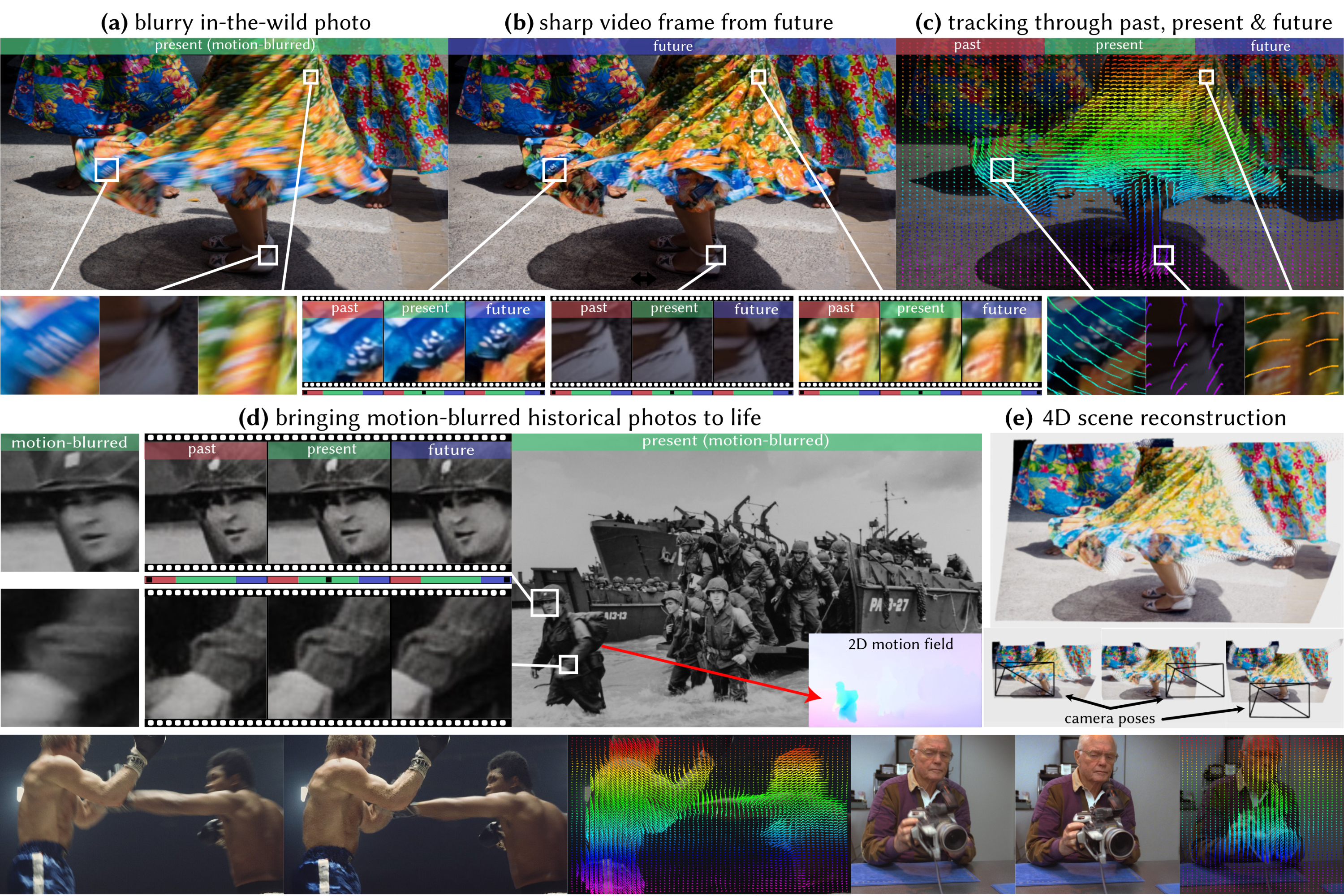 ACM TOG
ACM Transactions on Graphics (Proc. SIGGRAPH Asia 2025)
ACM TOG
ACM Transactions on Graphics (Proc. SIGGRAPH Asia 2025) -
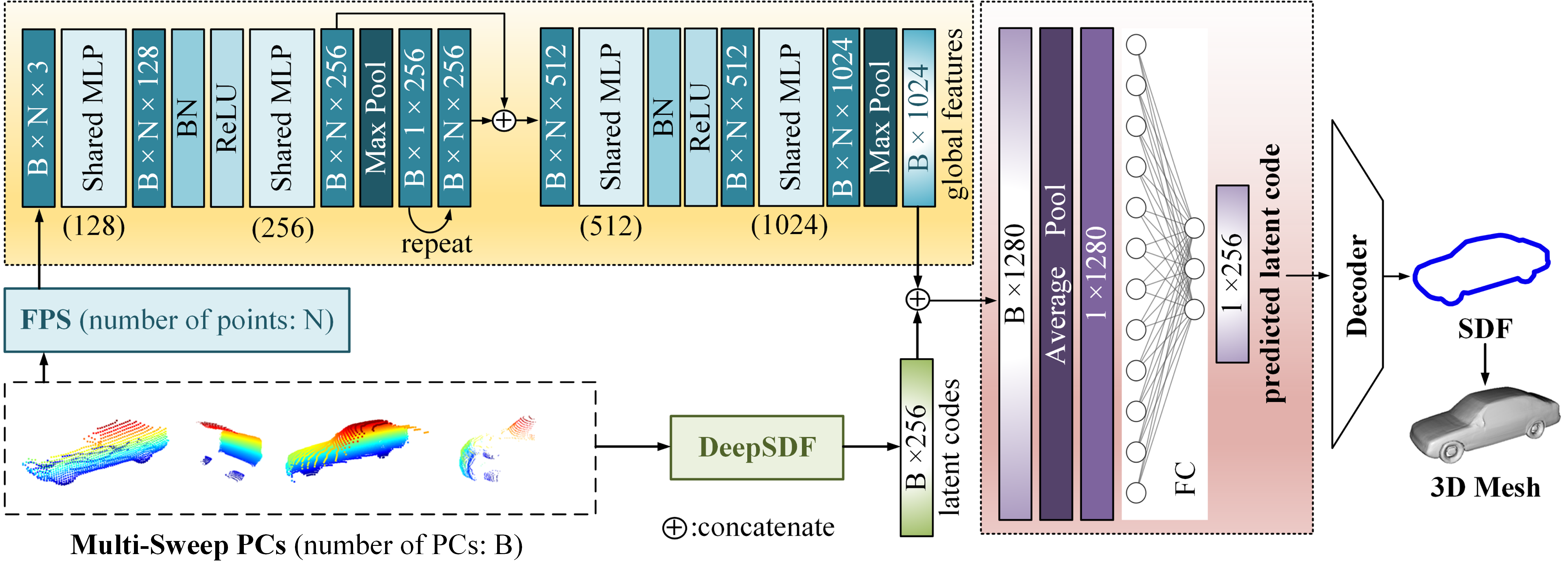 ICCV
International Conference on Computer Vision (ICCV 2023)
ICCV
International Conference on Computer Vision (ICCV 2023)
Teaching
- CSC2529: Computational Imaging @ UofT (2025, TA)
- CSC384: Introduction to Artificial Intelligence @ UofT (2025–2026, TA)
- CSC412: Probabilistic Learning and Reasoning @ UofT (2025, TA)